41 learning to drive from simulation without real world labels
Learning to drive from a world on rails | DeepAI A forward model of the world supervises a driving policy that predicts the outcome of any potential driving trajectory. To support learning from pre-recorded logs, we assume that the world is on rails, meaning neither the agent nor its actions influence the environment. Academic Journals | American Marketing Association Journal of Marketing (JM) develops and disseminates knowledge about real-world marketing questions useful to scholars, educators, managers, policy makers, consumers, and other societal stakeholders around the world.It is the premier outlet for substantive marketing scholarship. Since its founding in 1936, JM has played a significant role in shaping the content and …
UCI Machine Learning Repository: Data Sets - University of … The task is intended as real-life benchmark in the area of Ambient Assisted Living. 336. Open University Learning Analytics dataset: Open University Learning Analytics Dataset contains data about courses, students and their interactions with Virtual Learning Environment for seven selected courses and more than 30000 students. 337.
Learning to drive from simulation without real world labels
Learning to Drive from Simulation without Real World Labels - CORE We are not allowed to display external PDFs yet. You will be redirected to the full text document in the repository in a few seconds, if not click here.click here. PDF Urban Driving with Conditional Imitation Learning - GitHub Pages Several approaches have transferred policies from simulation to the real world. [12] use semantic segmentation masks as input and waypoints as output. [13] learn a control latent space that allows domain transfer between simulation and real world. week 5 diss 1.docx - "Simulation outcomes indicate that... " Simulation can be a powerful tool for understanding machine learning systems and designing methods to solve real-world problems" (Bewley, A., et al., 2018). This being said, I'll want to make sure that the simulation content is going to be relatable to the students, as well as something that they'll be able to apply to their coursework.
Learning to drive from simulation without real world labels. Educational technology - Wikipedia Educational technology is an inclusive term for both the material tools, processes, and the theoretical foundations for supporting learning and teaching.Educational technology is not restricted to high technology but is anything that enhances classroom learning in the utilization of blended, face to face, or online learning.. An educational technologist is someone who is … Learning to Drive from Simulation without Real World Labels Learning to Drive from Simulation without Real World Labels, Alex Bewley, Jessica Rigley, Yuxuan Liu, Jeffrey Hawke, Richard Shen, Vinh-Dieu Lam, Alex Kendall, Simulation can be a powerful tool for understanding machine learning systems and designing methods to solve real-world problems. SKY ENGINE AI | Synthetic Data Cloud for Deep Learning in the … Jun 01, 2020 · SKY ENGINE AI is a simulation and deep learning platform that generates fully annotated, synthetic data and trains AI computer vision algorithms at scale. The platform is architected to procedurally generate highly balanced imagery data of photorealistic environments and objects and provides advanced domain adaptation algorithms. Learning to Drive from Simulation without Real World Labels Learning to drive in the simulation domain presents innumerous advantages: avoiding human casualties and expensive crashes, changing lightning and weather conditions, and reshaping structural...
Publications - Home Jeffrey Hawke et al. Urban Driving with Conditional Imitation Learning. Proceedings of the International Conference on Robotics and Automation (ICRA), 2020. ... Yuxuan Liu, Jeffrey Hawke, Richard Shen, Vinh-Dieu Lam and Alex Kendall. Learning to Drive from Simulation without Real World Labels. Proceedings of the International Conference on ... Deep learning and process understanding for data-driven Earth … 13.02.2019 · Machine learning approaches are increasingly used to extract patterns and insights from the ever-increasing stream of geospatial data, but current approaches may not be optimal when system ... Federated Learning: A Step by Step Implementation in Tensorflow 10.04.2020 · Real world federated data held by clients are mostly NON independent and identically distributed (IID). For example, we could have replicated this scenario by constructing our client shards above such that each comprises of images from a single class — e.g client_1 having only images of digit 1, client_2 having only images of digit 2 and so on. Deep Reinforcement and Imitation Learning for Self-driving Tasks First, the goal in both is to finish the route keeping the car on the right lane or side, depending on the scenario, without going off the road or colliding; and the four agents are tested on both experiments. Second, the car is placed randomly within the right line or side of the road when starting a run.
Learning to Drive from Simulation without Real World Labels Learning to Drive from Simulation without Real World Labels, Authors: Alex Bewley, Queensland University of Technology, Jessica Rigley, University of Cambridge, Yuxuan Liu, Jeffrey Hawke, Wayve,... Learning to Drive from Simulation without Real World Labels Learning to Drive from Simulation without Real World Labels, Alex Bewley, Jessica Rigley, Yuxuan Liu, Jeffrey Hawke, Richard Shen, Vinh-Dieu Lam, Alex Kendall The authors are with Wayve in Cambridge, UK. Abstract, Simulation can be a powerful tool for understanding machine learning systems and designing methods to solve real-world problems. Learning to Drive from Simulation without Real World Labels Simulation can be a powerful tool for understanding machine learning systems and designing methods to solve real-world problems. Training and evaluating methods purely in simulation is often "doomed to succeed" at the desired task in a simulated environment, but the resulting models are incapable of operation in the real world. Yuxuan Liu | Papers With Code Learning to Drive from Simulation without Real World Labels. ... Simulation can be a powerful tool for understanding machine learning systems and designing methods to solve real-world problems. ... Imitation learning is an effective approach for autonomous systems to acquire control policies when an explicit reward function is unavailable ...
Learning to Drive in Cities - Autonomous Vision Blog
Learning to Drive from Simulation without Real World Labels Learning to Drive from Simulation without Real World Labels, Abstract: Simulation can be a powerful tool for under-standing machine learning systems and designing methods to solve real-world problems.

Simulation Training, Real Driving | Wayve
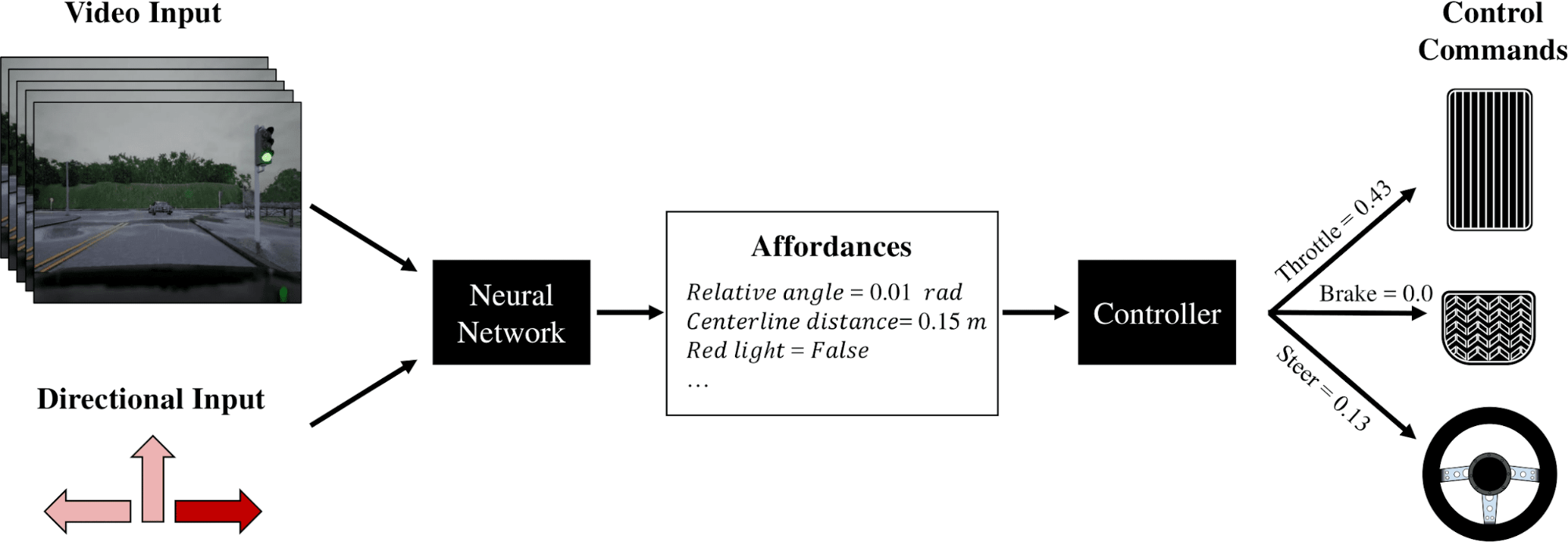
Autonomous-Driving/SOTA For DRL&AD.md at master - GitHub Learning to Drive from Simulation without Real World Labels, Wayve, 2018, paper, End-to-End Model-Free Reinforcement Learning for Urban Driving using Implicit Affordances, valeo, 2019, paper, OUR TOP TIPS FOR CONDUCTING ROBOTICS FIELD RESEARCH, 2019, blog, Urban Driving with Multi-Objective Deep Reinforcement Learning, AMMAS, paper,
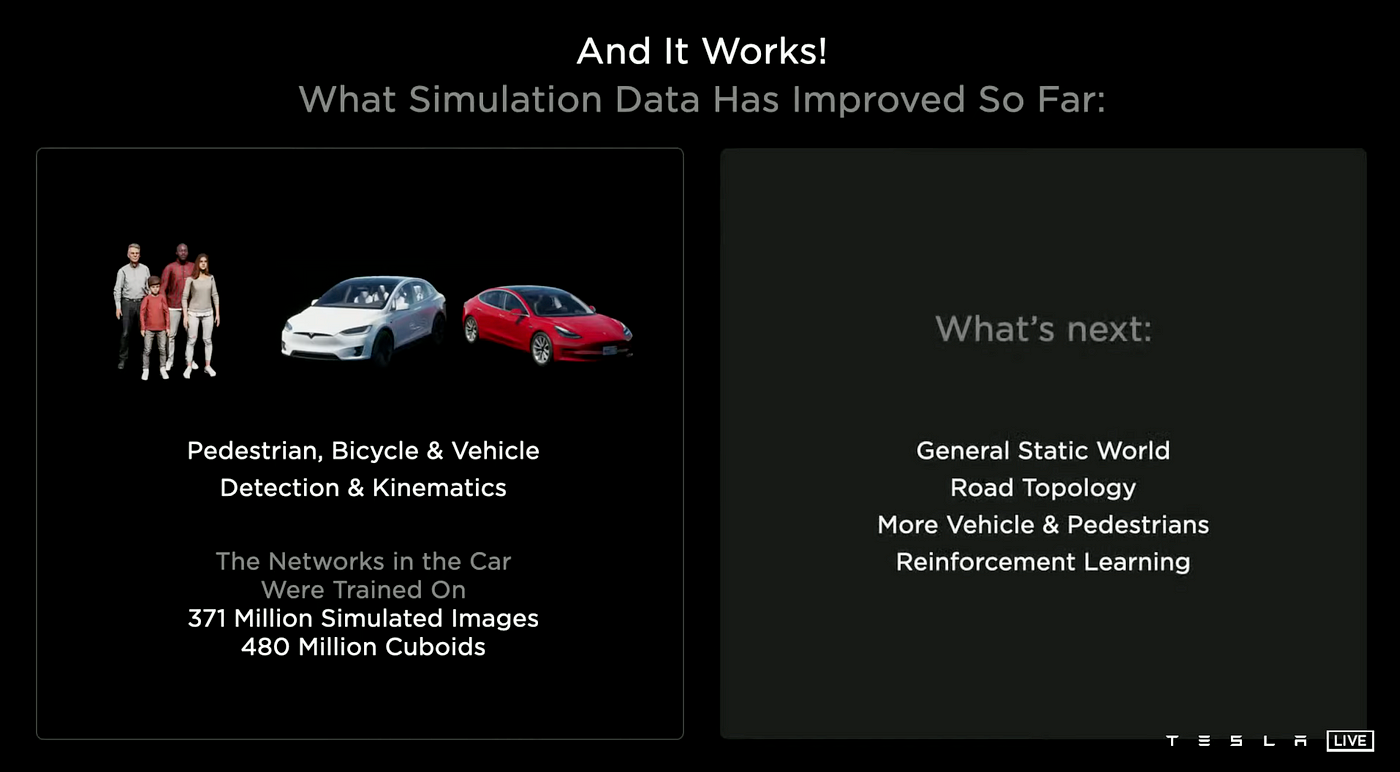
Are You Still Using Real Data to Train Your AI?
"Learning to Drive from Simulation without Real World Labels." - DBLP Bibliographic details on Learning to Drive from Simulation without Real World Labels. Stop the war! Остановите войну! ... "Learning to Drive from Simulation without Real World Labels." help us. How can I correct errors in dblp? ... Learning to Drive from Simulation without Real World Labels. ICRA 2019: 4818-4824. a service of ...

Google AI Blog: A Simulation Suite for Tackling Applied ...
Learning Interactive Driving Policies via Data-driven Simulation Search ACM Digital Library. Search Search. Advanced Search
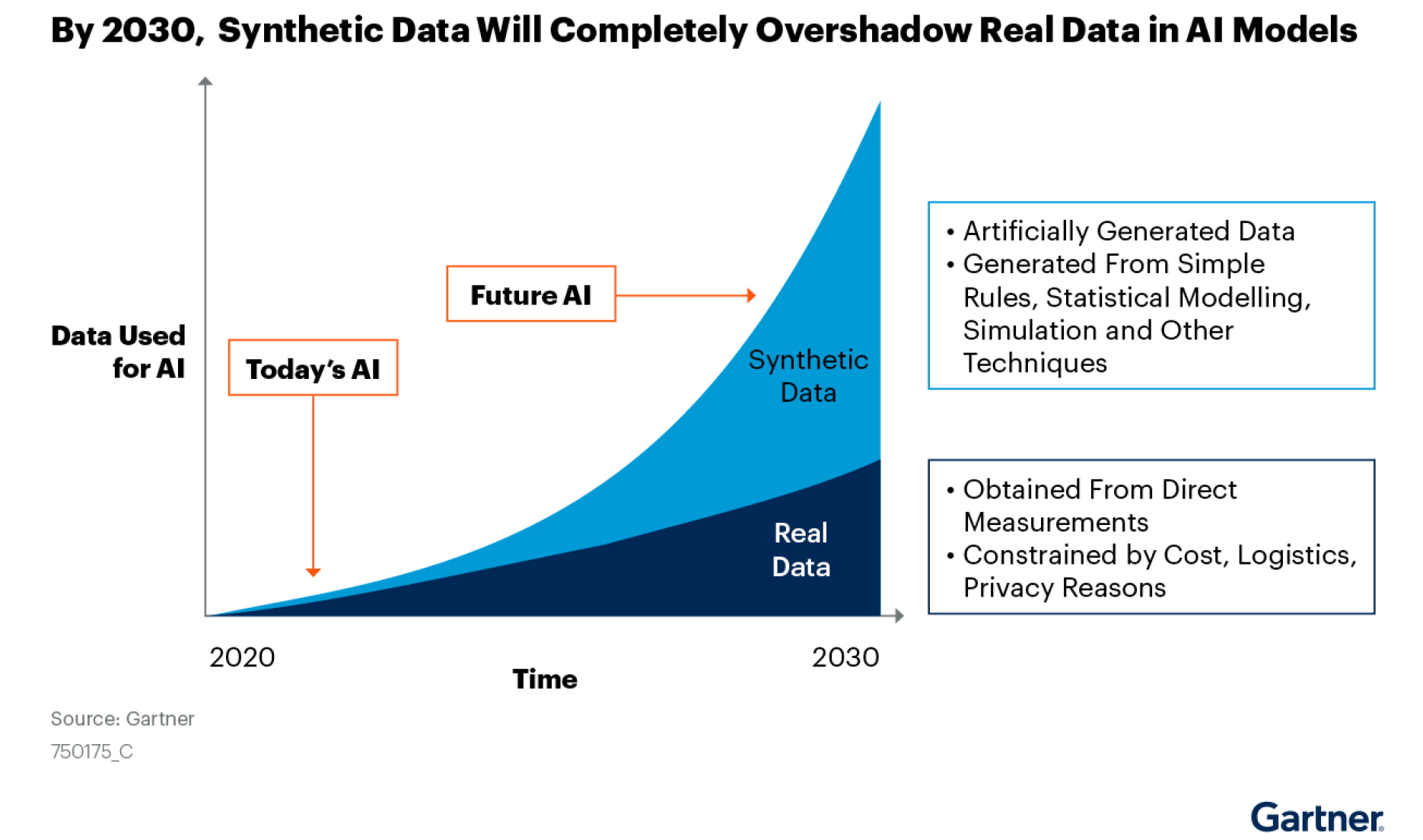
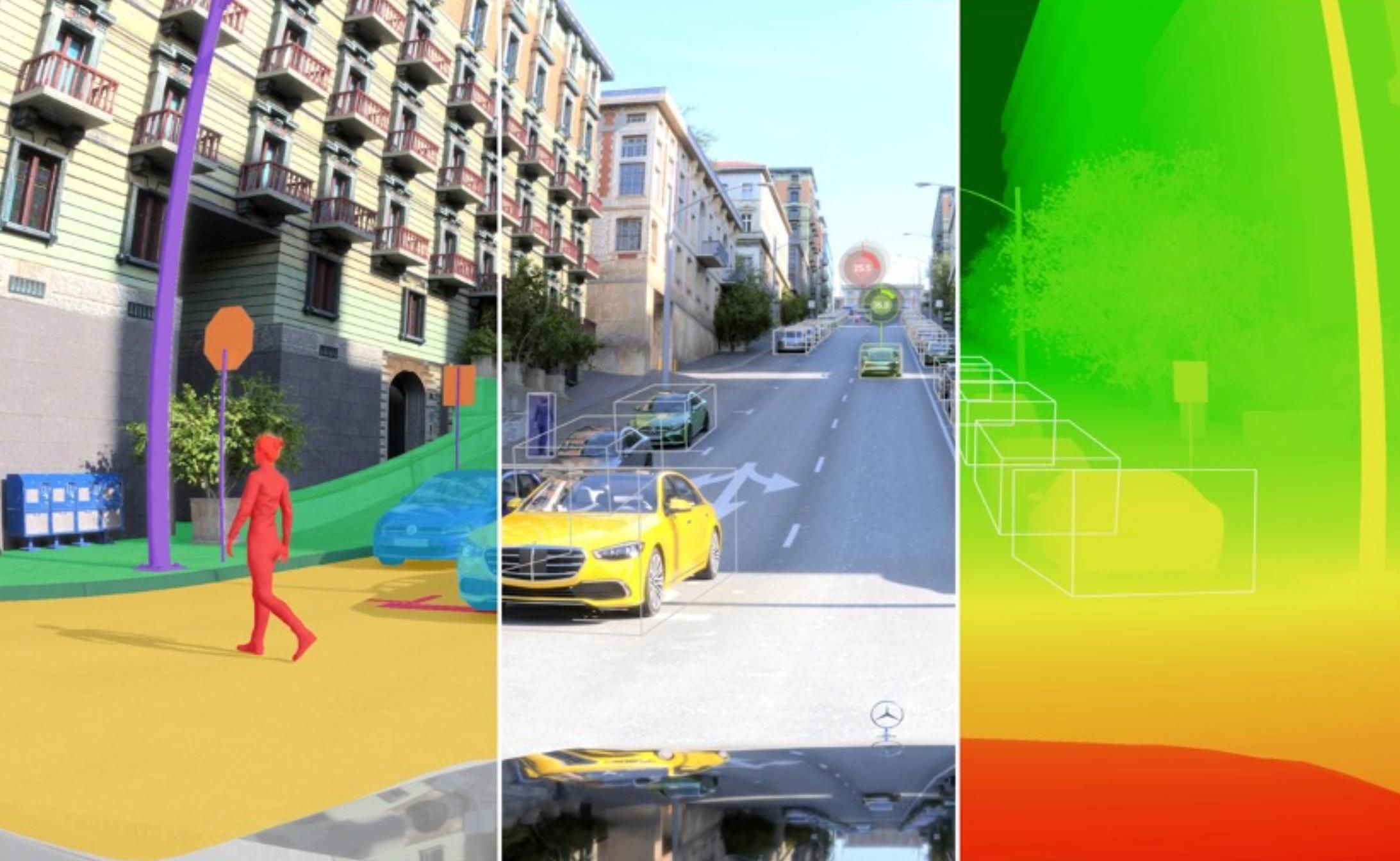
What Is Synthetic Data? | NVIDIA Blogs
Introduction to the CARLA simulator: training a neural network to ... Training neural network models on data gathered with two deterministic controllers and my non-deterministic self. Before we start, the source code for this whole project is available here. If you…

Simulation Training, Real Driving | Wayve
Sim2Real: Learning to Drive from Simulation without Real World Labels See the full sim2real blog: drive on real UK roads using a model trained entirely in simulation.Research paper: ....
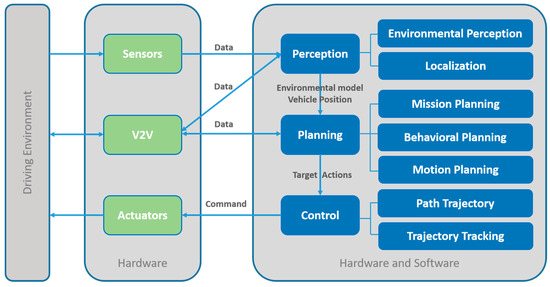
Sensors | Free Full-Text | A Systematic Review of Perception ...
The Learning Network - The New York Times A weekly collection of lesson plans, writing prompts and activities from The Learning Network, a site that helps educators and students teach and learn with The New York Times. SIGN UP Advertisement

Simulation Training, Real Driving | Wayve
Self-driving Research in Review: ICRA 2019 Digest - Medium Learning to Drive from Simulation without Real World Labels Paper from Wayve — Training a self-driving car in simulation as opposed to real-world is cheaper, faster and safer; however, such ...
Scaling up Synthetic Supervision for Computer Vision | by ...
Closing the Reality Gap with Unsupervised Sim-to-Real ... - SpringerLink Bewley, A., et al.: Learning to drive from simulation without real world labels. In: 2019 International Conference on Robotics and Automation (ICRA). IEEE (2019) Google Scholar Bousmalis, K., et al.: Using simulation and domain adaptation to improve efficiency of deep robotic grasping.

Integrating Machine Learning with Human Knowledge - ScienceDirect
Learning Interactive Driving Policies via Data-driven Simulation ... Data-driven simulators promise high data-efficiency for driving policy learning. When used for modelling interactions, this data-efficiency becomes a bottleneck: Small underlying datasets often lack interesting and challenging edge cases for learning interactive driving. We address this challenge by proposing a simulation method that uses in-painted ado vehicles for learning robust driving ...
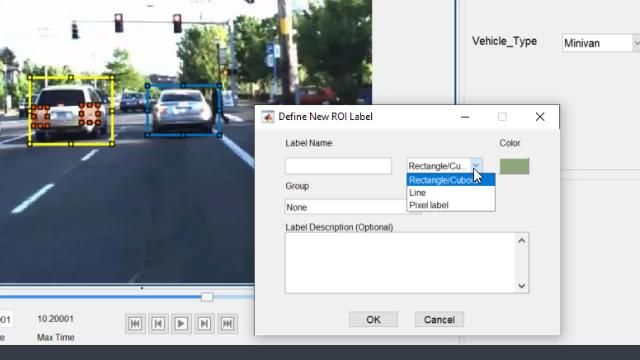
Automotive - Automated Driving Systems - MATLAB & Simulink
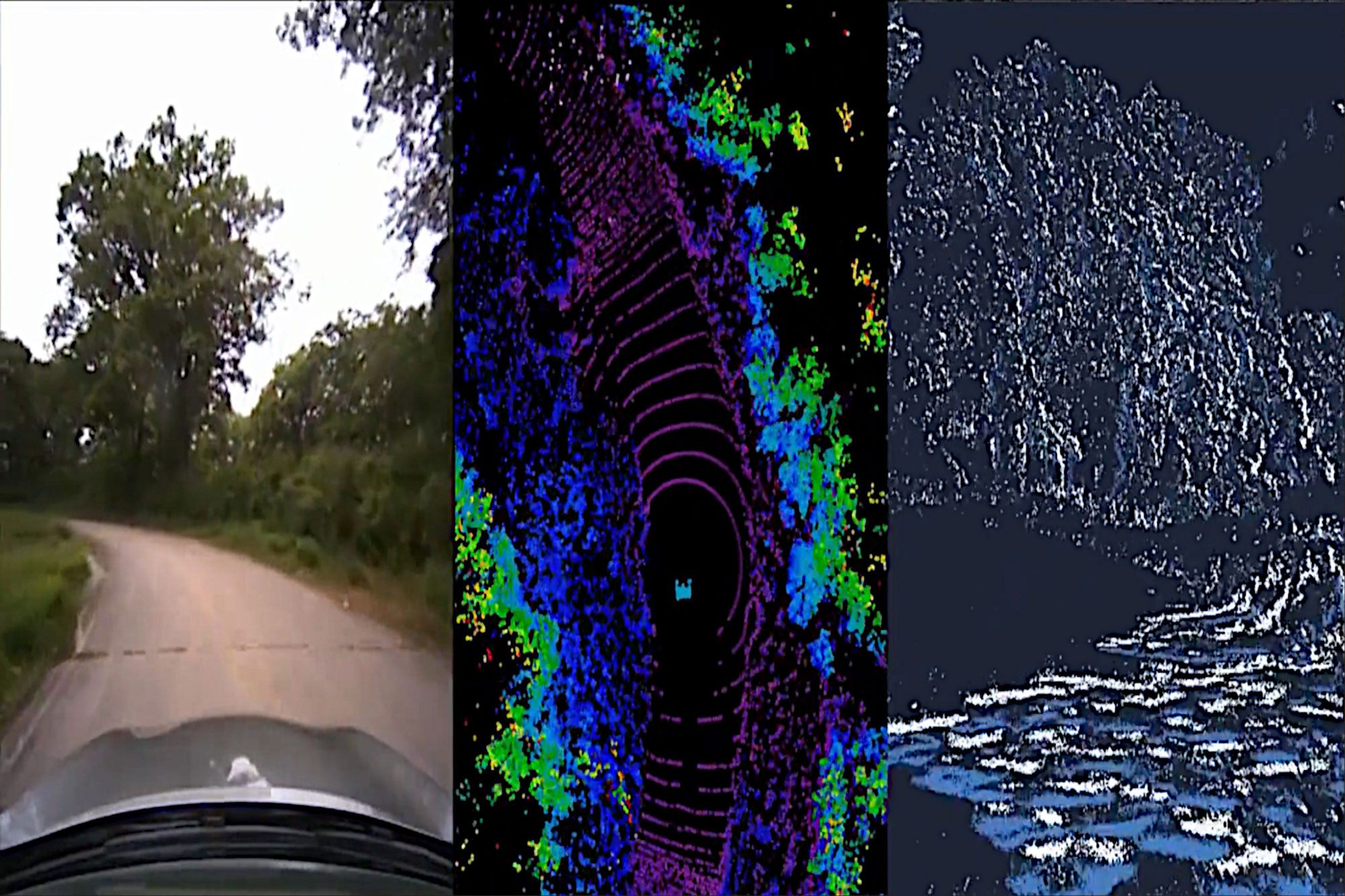
Edge Cases in Autonomous Vehicle Production - Datagen Figure 6. Comparison of simulated training and actual test environments in "Learning to Drive from Simulation without Real World Labels" (by Bewley et. al.) More recently, NVIDIA recently proposed a strategic approach named " imitation training " (Figure 7). In this approach, the failure cases of existing systems in the real world are ...

Deep Understanding Tesla FSD Part 4: Auto Labeling ...
Tackling Climate Change with Machine Learning - ACM … Studies, which for now are small scale, aim for complete 3D reconstruction with class labels for different components of buildings . 4.3 The Future of Cities. Since most of the resources of the world are ultimately channeled into cities, municipal governments have a unique opportunity to mitigate climate change. City governments regulate (and ...

Car Driving School Simulator
Learning Interactive Driving Policies via Data-driven Simulation The high-level pipeline of the proposed multi-agent data-driven simulation consists of (1) updating states for all agents, (2) recreating the world by projecting real-world image data to 3D space based on depth information, (3) configuring and placing meshes for all agents in the scene, (4) rendering the agent's viewpoint, and (5) post-processin...
Deep Reinforcement Learning for Autonomous Driving: A Survey
CengageBrain Hier sollte eine Beschreibung angezeigt werden, diese Seite lässt dies jedoch nicht zu.
Inside Waymo's Secret World for Training Self-Driving Cars ...
Research Roundup: Training with Synthetic Data - Datagen Learning to Drive from Simulation without Real World Labels (2018) Cambridge university researchers, working with a corporate team, teach a car to drive in a cartoon-like simulator. The novel idea was to teach the car to transcribe real-world data into its simulation-based understanding (real2sim) instead of attempting the reverse (sim2real).

Learning to Drive in Cities - Autonomous Vision Blog
ALEX | Alabama Learning Exchange Imagine if the world as you know it never changed. Students will embark on a journey back in time and research what life in Alabama looked like in the late twentieth and early twenty-first centuries. Students will compare and contrast the information they research with their present-day lives. Students will then identify how technological advancements changed life for Alabamians and …

Learning to Drive from Simulation without Real World Labels ...
Technology | Wayve Learning to Drive from Simulation without Real World Labels. Alex Bewley, Jessica Rigley, Yuxuan Liu, Jeffrey Hawke, Richard Shen, Vinh-Dieu Lam and Alex Kendall. Proceedings of the International Conference on Robotics and Automation (ICRA). May, 2019. Learning to Drive in a Day.
Berkeley DeepDrive | We seek to merge deep learning with ...
FAQ | MATLAB Wiki | Fandom Back to top A cell is a flexible type of variable that can hold any type of variable. A cell array is simply an array of those cells. It's somewhat confusing so let's make an analogy. A cell is like a bucket. You can throw anything you want into the bucket: a string, an integer, a double, an array, a structure, even another cell array. Now let's say you have an array of buckets - an array of ...

Learning to Drive Smoothly in Minutes | by Antonin RAFFIN ...
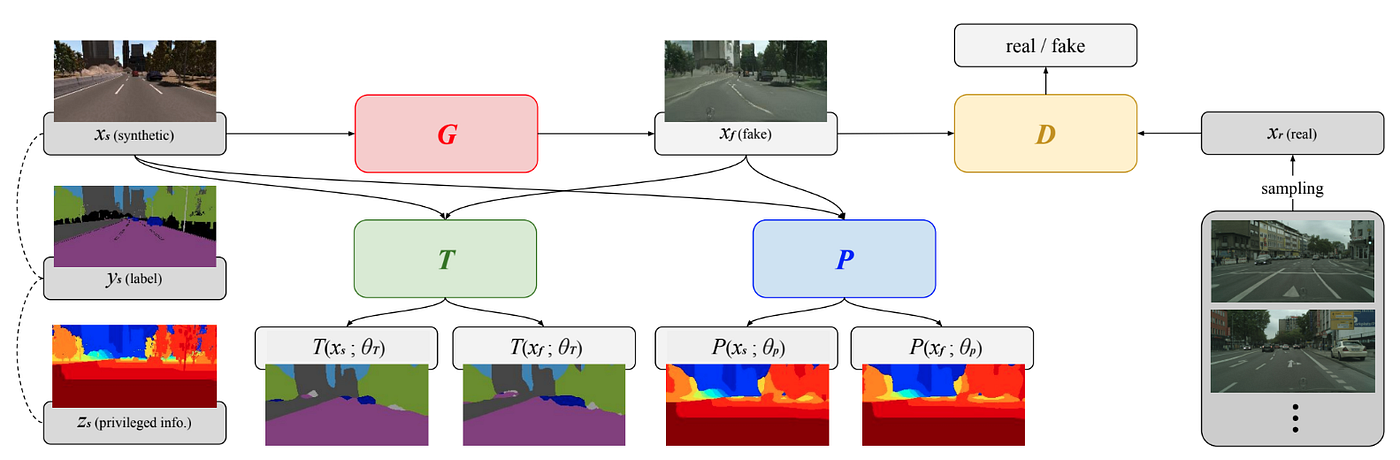
Alex Bewley A method for transferring a vision-based lane following driving policy from simulation to operation on a rural road without any real-world labels. Our approach leverages recent advances in image-to-image translation to achieve domain transfer while jointly learning a single-camera control policy from simulation control labels. pdf, video, bib,

Sim2Real: Learning to Drive from Simulation without Real ...
Simulation-Based Reinforcement Learning for Real-World Autonomous Driving This work presents a method for transferring a vision-based lane following driving policy from simulation to operation on a rural road without any real-world labels and assesses the driving performance using both open-loop regression metrics, and closed-loop performance operating an autonomous vehicle on rural and urban roads. 55,
Researchers release open-source photorealistic simulator for ...
week 5 diss 1.docx - "Simulation outcomes indicate that... " Simulation can be a powerful tool for understanding machine learning systems and designing methods to solve real-world problems" (Bewley, A., et al., 2018). This being said, I'll want to make sure that the simulation content is going to be relatable to the students, as well as something that they'll be able to apply to their coursework.

Simulation Training, Real Driving | Wayve
PDF Urban Driving with Conditional Imitation Learning - GitHub Pages Several approaches have transferred policies from simulation to the real world. [12] use semantic segmentation masks as input and waypoints as output. [13] learn a control latent space that allows domain transfer between simulation and real world.
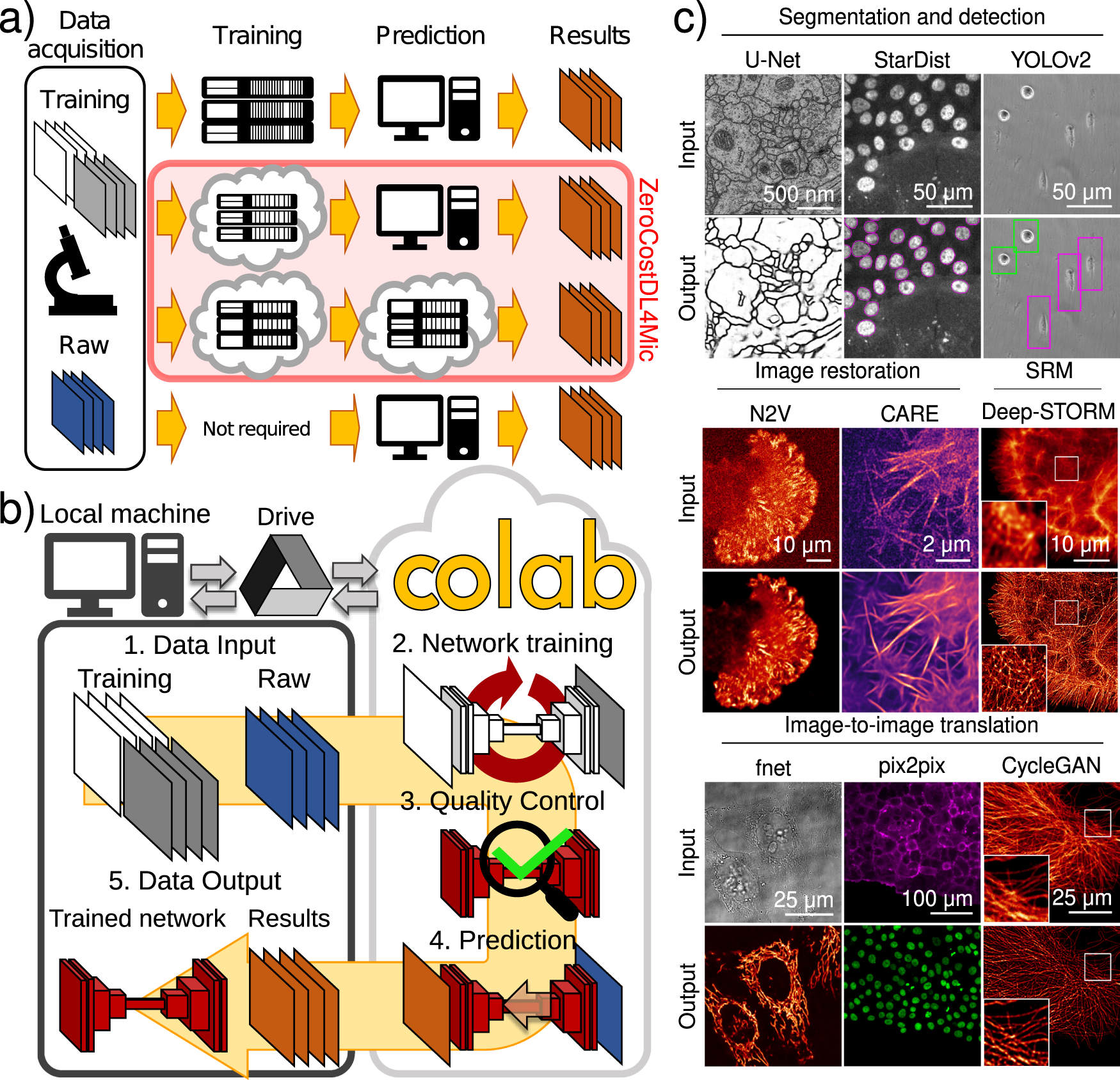
Democratising deep learning for microscopy with ...
Learning to Drive from Simulation without Real World Labels - CORE We are not allowed to display external PDFs yet. You will be redirected to the full text document in the repository in a few seconds, if not click here.click here.

How Drive.ai Is Mastering Autonomous Driving With Deep ...
Simulation Training, Real Driving | Wayve

Deep Learning Summit London 2019 - Day 1 - HackMD
Deep Understanding Tesla FSD Part 4: Auto Labeling ...

This super-realistic virtual world is a driving school for ...

Car Racing Highway Driving Simulator, real parking driver sim speed traffic deluxe 2022

Learning to Drive from Simulation without Real World Labels ...
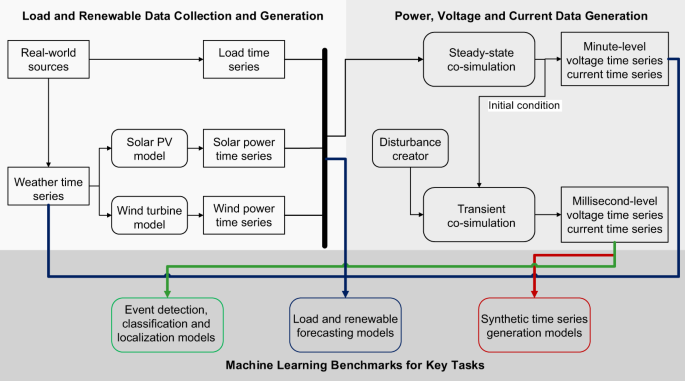
A multi-scale time-series dataset with benchmark for machine ...

TranSim™ Truck Driving Simulator | L3Harris™ Fast. Forward.
UvA autonomous driving: Labbook 2020
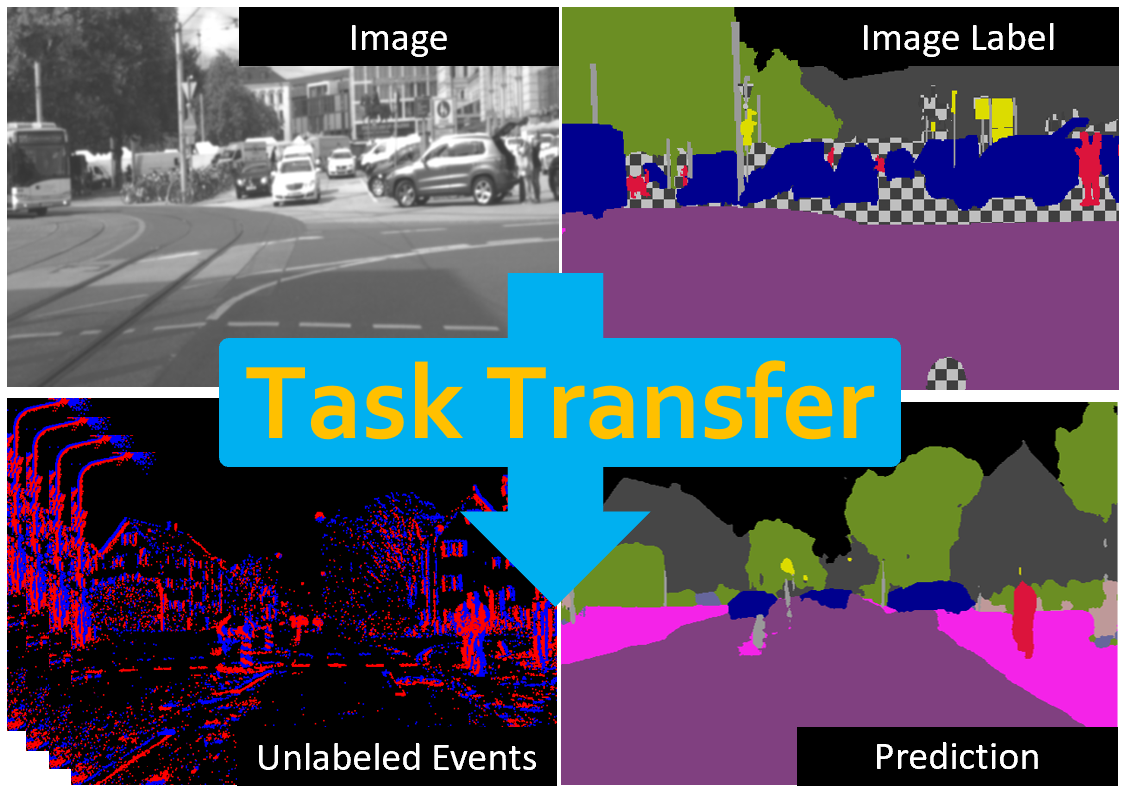
Event Cameras, Event camera SLAM, Event-based Vision, Event ...

TransitSim™ Bus Driver Training Simulator | L3Harris™
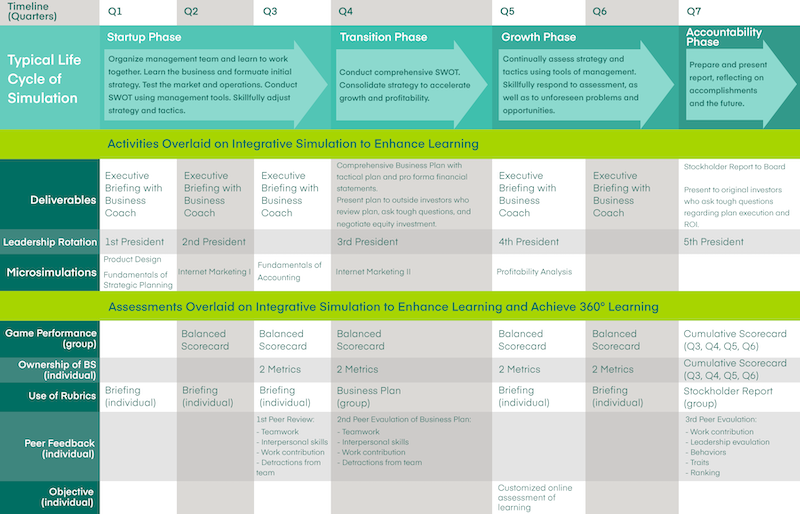
Simulations Spark Engagement and Real Learning| AACSB
![PDF] Learning to Drive from Simulation without Real World ...](https://d3i71xaburhd42.cloudfront.net/1254306ab0e1c8e179d9f31b4b9ea0cef7398bd8/4-Figure4-1.png)
PDF] Learning to Drive from Simulation without Real World ...

ADAS & Autonomous Vehicle Simulation Software | Ansys
![PDF] Learning to Drive from Simulation without Real World ...](https://d3i71xaburhd42.cloudfront.net/1254306ab0e1c8e179d9f31b4b9ea0cef7398bd8/3-Figure3-1.png)
PDF] Learning to Drive from Simulation without Real World ...

PDF) Learning to Drive from Simulation without Real World Labels

Agents, environments, scenarios: A framework for examining ...
Post a Comment for "41 learning to drive from simulation without real world labels"